** KiCad.org의 Getting Started 문서를 번역해 보았다. 전체를 번역하지는 않았다.
KiCad 소개
KiCad는 전자회로와 PCB 아트웍을 생성하기 위한 오픈소스 툴이다.
단일 표면 아래에서 KiCad는 다음의 독립실행 툴과 통합한다.
| 프로그램 | 설명 | 확장자 |
|---|---|---|
| KiCad | 프로그램 매니저 | *.pro |
| Eeshema | 회로도(schematic)와 컴포넌트(Component) 편집기 | *.sch, *.lib, *.net |
| Pcbnew | 회로기판과 footprint 편집기 | *.kicad_pcb, *.kicad_mod |
| GerbView | 거버(Gerber)와 드릴링 파일 뷰어 | \*.g\*, *.drl, etc |
| Bitmap2Componet | 비트맵 이미지를 컴포넌트 또는 footprints로 변환 | *.lib, *.kicad_mod, *.kicad_wks |
| PCB Calculator | 컴포넌트, 트랙 폭(track width), 전기적 공간(electric spacing), 색상코드, ... | None |
| PI Editor | 페이지 레이아웃 편집기 | *.kicad_wks |
파일 확장자 목록은 완전하지 않고 단지 KiCad가 지원하는 파일의 부분만을 포함한다. 이것은 어떤 파일이 각 KiCad 응용프로그램에 사용되는지에 대한 기본적인 이해를 하는데 도움이 된다.
KiCad는 복잡한 전자 보드의 성공적인 개발과 유지에 사용되기에 충분히 성숙한 것으로 생각할 수 있다.
KiCad는 어떤 보드크기 제한도 없고 copper 32레이어, technical 14레이어, auxiliary 32레이어까지 다룰 수 있다. KiCad는 프린트 보드 제작, 포토 플로터용 거버파일, 드릴링 파일, 컴포넌트 위치 파일 등을 위해 필요한 모든 파일을 생성할 수 있다.
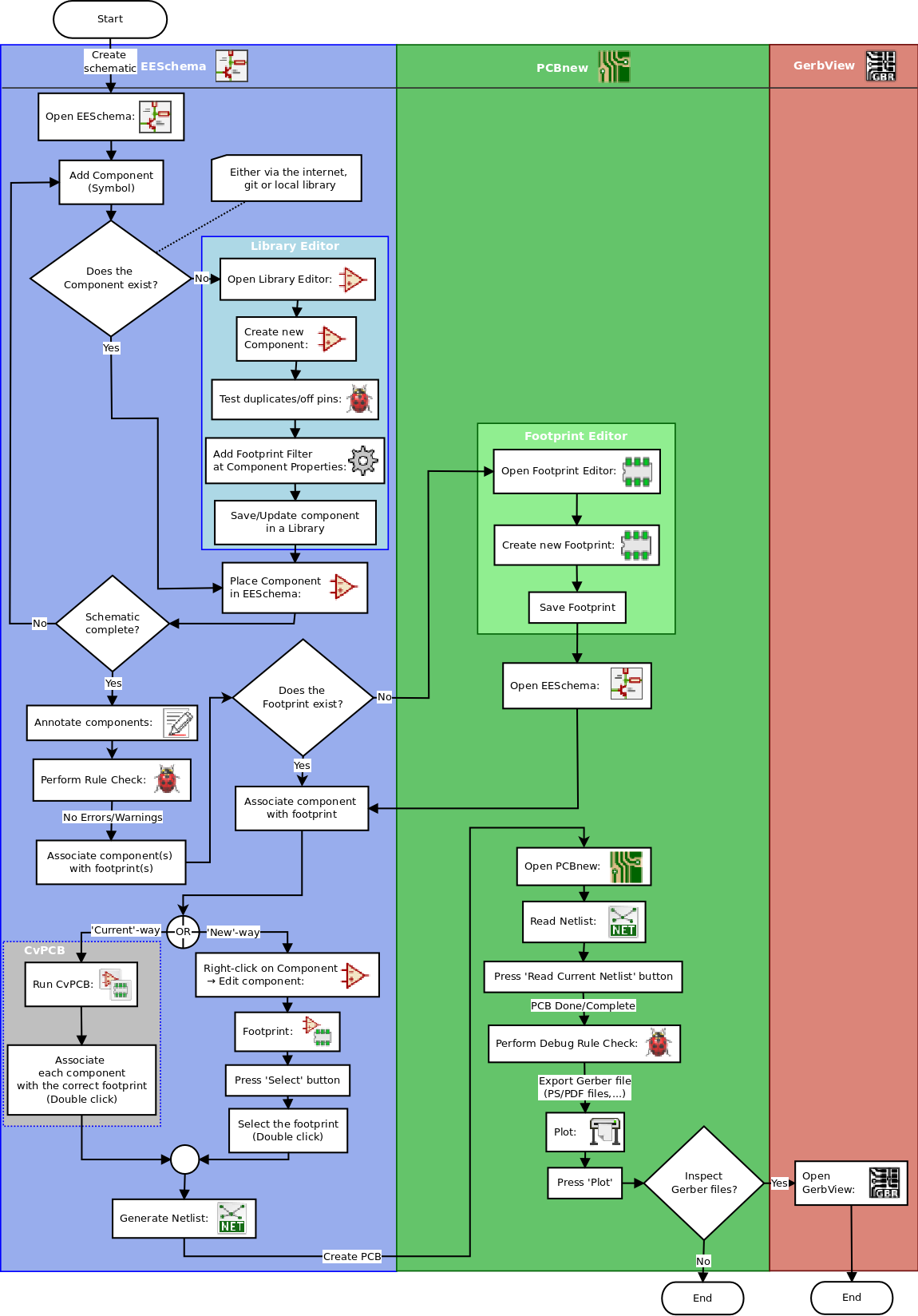
KiCad Workflow
다른 PCB 설계 소프트웨어와 유사하지만, KiCad는 회로 컴포넌트와 footprint가 분리된 워크플로우가 특징이다. 회로도가 생성된 이후에만 footprint가 컴포넌트에 할당될 수 있다.
Overview
KiCad 작업흐름(Workflow)은 회로도와 보드 레이아웃 설계 두가지 주요 작업으로 구성된다. 회로도 컴포넌트 라이브러리와 PCB footprint 라이브러리 모두 이 주요 작업에 모두 필요하다. KiCad는 많은 컴포넌트와 footprint를 포함하고 또한 새로 만들기 위한 툴 또한 가지고 있다.
아래 그림에서 KiCad 작업흐름을 볼 수 있다. 흐름도는 작업해야 할 단계와 순서를 설명한다. 해당될 때 편의를 위해 아이콘이 추가되었다.
컴포넌트 생성에 관한 추가 자료
Footprint 생성에 관한 추가자료
Quiklib는 KiCad 라이브러리 컴포넌트를 웹에서 빠르게 만들 수 있는 도구이다.Making Schematic Components With Quicklib
Forward and backward annotation
전자회로를 그린 이후 다음 단계는 PCB로 옮기는 것이다. 때때로 추가적인 컴포넌트, 다른 크기로 바뀐 부품, net 이름 수정 등이 추가되어야 할 수 있다. 이것은 포워드 어노테이션(Forward Annotation)과 백워드 어노테이션(Backward Annotation) 두가지 방법으로 할 수 있다.
포워드 어노테이션은 회로 정보를 일치하는 PCB 레이아웃으로 보내는 절차이다. 이것은 적어도 한번은 초기에 PCB로 회로를 임포트해야 하기 때문에 기본이되는 특성이다. 그 후에 포워드 어노테이션은 늘어난 회로 변화를 PCB에 보낼 수 있게 한다. 좀 더 자세한 내용은 여기를 참조하자.
백워드 어노테이션은 PCB 레이아웃 변화를 일치하는 회로로 보내는 절차이다. 백워드 어노테이션에 대한 두가지 일반적인 원인은 게이트 스왑(gate swap)과 핀 스왑(pin swap)이다. 이런 경우에 기능적으로 동일한 게이트 또는 핀이 있지만 정확한 게이트 또는 핀을 선택하는 것에 대한 강한 경우가 있는 레이아웃 중에만 있다. PCB에서 선택이 이루어지면 이 변화는 회로로 다시 전달된다.
KiCad 사용
단축키
KiCad는 관련되지만 다른 엑셀러레이터(accelerator)와 핫키(hotkey) 두가지 단축키가 있다. 두가지 모두 마우스를 이용해 명령을 수행하는 것 대신 키보드로 KiCad에서 작업속도를 높힌다.
Accelerator Keys
엑셀러레이터 키는 메뉴 또는 쿨바 아이콘을 클릭하는 것과 동일한 동작을 한다. 메뉴 또는 툴바 아이큰을 클릭하는 것은 해당 명령을 입력하지만 클릭된 마우스 버튼을 벗어날 때까지 아무런 동작도 하지 않는다. 엑셀러레이터 키는 명령모드로 들어가고 싶지만 즉각적인 동작을 원하지 않을때 사용한다.
엑셀러레이터 키는 아래 그리과 같이 모든 메뉴의 오른쪽 옆에 나타난다.

Hotkeys
핫키는 엘셀러레이터 키와 마우스 왼쪽 클릭을 합친것과 같다. 핫키는 사용하는 것은 현재 커서 위치에서 즉각적으로 명령을 시작한다. 작업흐름에 끼어드는 것 없이 빠르게 명령을 바꾸기 위해 핫키를 사용한다.
KiCad 툴내에서 핫키를 보려면 Help → List Hotkeys 또는 Ctrl + F1 키를 누른다.

Preferences → Hotkeys Options 메뉴에서 핫키의 할당을 수정할 수도 임포트 또는 익스포트 할 수 있따.
이 문서에서는 핫키를 대괄호(bracket)으로 표현한다. 예를 들어 [a]는 키도드에서 "a"키를 누르는 것이다.
Example
회로도에서 선(wire)를 추가하는 것에 대한 간단한 예를 생각해 보자.
엑셀러레이터 키로는 "Add wire" 명령을 호출하기 위해 "Shift + W"를 누른다.(커서가 바뀐다.) 다음으로 선을 그리기 시작하기 위해 원하는 선의 시작위치에서 왼쪽 마우스를 클릭한다.
핫키로는 간단하게 [W]를 누르면 현제 커서 위치에서 즉시 선이 시작한다.
전자회로 그리기
이 문단에서는 KiCad로 회로도(electronic schematic)을 그리는 방법에 대해 알아본다.
Eeschema 사용
윈도우에서 KiCad.exe를 실행한다. 리눅스에서는 터미널에 'kicad'를 입력한다. 그러면 KiCad 프로젝트 매니저의 메인 윈도우에 있게 된다. 여기서 Eeschema, Schematic Library Editor, Pcbnew, PCB Footprint Editor, GerbView, Bitmap2Component, PCB Calculator, PI Editor 8가지 독립 실행 소프트웨어 툴에 접근할 수 있다.

File → New → Project로 새로운 프로젝트 'Name'을 생성한다. 프로젝트 파일은 자동으로 ".pro" 확장자를 갖는다. 정확한 다이얼로그의 모습은 사용하는 플랫폼에 따라 다르지만 새로운 디렉토리를 생성하는 체크박스가 있다. 작업할 디렉토리가 이미 있지 않다면 체크박스에 체크한다. 모든 프로젝트 파일이 이 디렉토리에 저장된다.
전자회로를 그려보자.
 아이콘을 선택하여 Eeschema 회로 편집기(shematic editor)를 시작한다. 이 아이콘은 왼쪽에서 첫번째 버튼이다.
아이콘을 선택하여 Eeschema 회로 편집기(shematic editor)를 시작한다. 이 아이콘은 왼쪽에서 첫번째 버튼이다.툴바에서 'Page setting'아이콘(
 )을 누한다. 적절한 'paper size'를 설정하고 제목(Title)을 'Tutorial1'으로 입력한다. 여기서 필요하다면 더 많은 정보를 입력할 수 있다. 'OK'를 누르면 이 정보가 도면의 오른쪽 아래에 보인다. 확대/축소를 위해서는 마우스 휠을 사용하고 전체 회로를 저장하는 것은 File → Save를 사용한다.
)을 누한다. 적절한 'paper size'를 설정하고 제목(Title)을 'Tutorial1'으로 입력한다. 여기서 필요하다면 더 많은 정보를 입력할 수 있다. 'OK'를 누르면 이 정보가 도면의 오른쪽 아래에 보인다. 확대/축소를 위해서는 마우스 휠을 사용하고 전체 회로를 저장하는 것은 File → Save를 사용한다.이제 첫번째 컴포넌트를 위치시켜 보자. 오른쪽 툴바에서 'Place Symbol'아이콘(
 )을 클릭한다. 핫키로 [a] - 'Add Symbol'을 사용할 수도 있다.
)을 클릭한다. 핫키로 [a] - 'Add Symbol'을 사용할 수도 있다.회로도의 중간을 클릭하면 Choose Symbol Window가 화면에 나타난다. 첫번째 컴포넌트로는 저항(resistor)을 사용한다. Resistor의 'R'로 검색(search)/필터링(filter)한다. 저항위에 'Device' 헤더가 있는 것을 알 수 있다. 'Device' 헤더는 컴포넌트가 위히한 라이브러리의 이름으로 'Device'는 상당히 포괄적이면서 유용한 라이브러리이다.

저항을 더블클릭하면 'Choose Symbol'윈도우가 닫힌다. 원하는 곳에서 클릭하여 회로도에 컴포넌트를 위치시킨다.
컴포넌트에서 확대하기 위해 돋보기 아이콘을 클릭한다. 아니면 확대/축소를 하기 위해 마우스 휠을 사용한다. 수직과 수평으로 이동하기 위해 마우스 휠 버튼을 누른다.
컴포넌트 'R' 위에 마우스를 올려놓고 [r]을 누르면 컴포넌트가 회전한다. 컴포넌트를 회전시키기 위해 컴포넌트를 실제로 클릭할 필요가 없다.
때때로 마우스가 다른것위에 있다면, 메뉴가 나타날 것이다. 자주 KiCad에서 Clarify Selection menu를 볼 것이다. 이것은 서로 꼭대기에 있는 객체에서 작업할 수 있도록 한다. 이런 경우,만약 메뉴가 나타나면 'Symbol...R...'에서 동작을 KiCad가 수행하하도록 한다.
컴포넌트의 중앙에서 오른쪽 클릭을 하고 Properties &rarr Edit Value를 선책한다. 마우스를 컴포넌트 위에 놓고 [v]를 누르는 것도 동일하다. 대신 [e]는 좀더 포괄적인 속성 윈도우를 보여줄 것이다. 아래 오른쪽 클릭 메뉴가 어떻게 가능한 동작에 대한 핫키를 보여주고 있는지 보자.

Edit Value 필드가 나타난다. 현재 값 'R'을 '1k'로 바꾸고 'OK'를 누른다.
참조 필드(Reference Field, R?)은 변경하면 안된다. 이 필드는 이후에 자동적으로 완성된다. 위 저항의 값은 이제 '1K'가 된다.

다른 저항을 위치시키기 위해서는 간단하게 저항이 나타나기 원하는 곳을 클릭하면 'Symbol Selection Window'가 다시 나타난다.
이전에 선택한 저항이 'R'로 보이는 이력목록(history list)이 있다. 'OK'를 누르고 컴포넌트를 위치시킨다.

실수를 해서 컴포넌트를 지우고 싶은 경우, 해당 컴포넌트를 오픈쪽 클릭하고 'Delete'를 클릭하면 회로도에서 컴포넌트를 제거한다. 다른 방법으로 지우길 원하는 컴포넌트 위에 마우스를 올리고 [delete]를 누를 수도 있다.
또한 이미 회도도에 있는 컴포넌트에 마우스를 올리고 [C]를 눌러 복제할 수도 있다. 원하는 곳을 클릭하여 복제된 컴포넌트를 위치시킨다.
두번째 저항에서 오른쪽 클릭하고 'Drag'를 선택한다. 컴포넌트의 위치를 바꾸고 고정하기 위해 왼쪽 클릭을 한다. 동일한 기능을 컴포넌트 위에 마우스를 위치하고 [g]를 누른다. [r]은 컴포넌트를 회전시키지만, [x]와 [y]는 x축 또는 y축에 대해 뒤집는다.
Right-Click → Move 또는 [m]은 또한 어떤것이든 움직이기 위한 유용한 옵션이지만, 컴포넌트 레이블 또는 아직 연결되지 않은 컴포넌트에만 사용하는 것이 더 좋다. 해당 경우에 왜 그런지는 이후에 살펴 볼 것이다.
두번째 저항에 마우스를 올리고 [v]를 눌러 'R'을 '100'으로 수정한다. 'Ctrl + Z'로 수정한 작업을 되돌릴 수 있다.
그리드 크기(grid size)를 바꾼다. 아마 회로도의 모든 컴포넌트가 커다란 간격의 그리드를 따라 움직일 것이다. Rignt-Click → Grid로 그리드의 크기를 쉽게 바꿀 수 있다. 회로도에는 50.0mils의 크리드를 사용하는 것이 권장된다.
이번에는 기본적으로 프로젝트에서 설정되지 않은 라이브러리에서 컴포넌트를 추가한다. 메뉴에서 Preferences → Manage Symbol Libraries를 선택한다. Symbol Libraries 윈도우에서 Global Library와 Project Specific Libraries인 두갱의 탭을 볼 수 있다. 각각은 sym-lib_table 파일 하나를 갖는다. 라이브러리(.lib 파일)이 사용가능하려면 이 sym-lib-table 파일주 어느 하나에 있어야 한다. 만약 로컬시스템에 라이브러리 파일이 있고 아직 사용할 수 없다면, sym-lib-table 파일중 하나에 추가할 수 있다. 여기서는 이미 사용가능한 라이브러리를 추가해 볼 것이다.
Project Specific table을 선택한다. 테이블 아래 파일 browser를 클릭한다. 로컬 PC에 설치된 공식 KiCad 라이브러리 위치를 찾는다. 수백개의 .dcm과 .lib파일을 포함하는 library 디렉토리를 찾는다. 윈도우에서는 C:\Program Files (x86)\KiCad\Share\를 리눅스에서는 /usr/share/kicad/library/를 한번 찾아보자. 디렉토리를 찾아 선택하고 'MCU_Microchip_PIC12.lib' 라이브러리는 추가한 후 윈도우를 닫는다. 이 라이브러리는 목록의 맨 마지막에 추가될 것이다. 이제 이것의 닉네임을 선택하여 'microchip_pic12mcu'로 바꾸고 'OK'로 Symbol Libraries 윈도우를 닫는다.
컴포넌트를 회로에 추가하는 단계를 반복한다. 이번에는 'Device'라이브러리 대신 'microchip_pic12mcu'에서 'PIC12C508A-ISN' 컴포넌트를 선택한다.
마이크로컨트롤러 컴포넌트 위에 마우스를 위치시킨다. G0과 G1 핀이 오른쪽을 가르키도록 [y]를 눌러 Y축 기준으로 반전시킨다.
컴포넌트를 회로에 추가하는 단계를 반복한다. 이번에는 'Device' 라이브러리에서 'LED'를 선택한다.
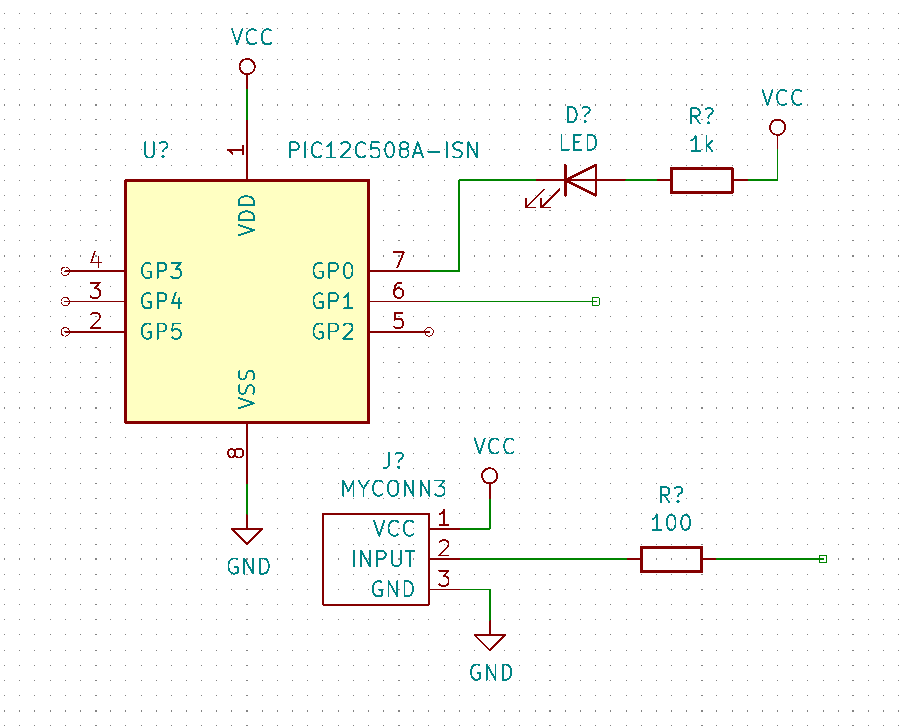
아래처럼 모든 컴포넌트를 배치한다.

이번에는 3핀 컨넥터를 위한 'MYCONN3' 회로 컴포넌트를 만들어야 한다. 어떻게 설계부터 컴포넌트를 만드는지를 배우기 위해 Make Schematic Symbos in KiCad 순서로 건너 뛴 후 다시 돌아올 수도 있다.
이제 새롭게 만든 컴포넌트를 추가할 수 있다. [a]를 누르고 'myLib' 라이브러리에서 'MYCONN3' 컴포넌트를 선택한다.
컴포넌트 식별자 'J?'가 'MYCONN3' 레이블 아래에 나타난다. 만약 이 위치를 바꾸고 싶다면, 'J?'를 오른쪽 클릭하고 'Move Field' ([m]과 동일)을 선택한다. 'J?'를 아래 그림과 같이 위치시킨다. 'MYCONN3' 레이블 또한 원하는 만큼 옮길 수 있다.

이제는 전원(power)과 접지(ground)를 추가할 차례이다. 오른쪽 툴바에서 'Place Power Port' 아이콘(
 )을 선택한다([p]를 눌러도 된다.). 컴포넌트 선택 윈도우를 아래로 내려 'Power'라이브러리의 'VCC'를 선택하고 'OK'를 누른다.
)을 선택한다([p]를 눌러도 된다.). 컴포넌트 선택 윈도우를 아래로 내려 'Power'라이브러리의 'VCC'를 선택하고 'OK'를 누른다.위에서 추가한 1k 저항의 핀을 'VCC' 부품을 배치하기 위해 클릭한다. 또 마이크로컨트롤러 'VDD' 영역을 클릭한다. 'Component Selection History' 부분에서 'VCC'를 선택하고 'VDD'핀 옆에 배치한다. 추가 절차를 다시 반복하고 'MYCONN3'의 'VCC'핀 위에 'VCC' 부품을 배치한다. 필요하다면 참조(reference)와 값(value)을 옮긴다.
핀추가(add-pin) 절차를 반복한다. 하지만 이번에는 'GND' 부품을 선택한다. 'MYCONN3'의 'GND' 핀 아래에 'GND' 부품을 배치한다. 마이크로컨트롤러의 'VSS' 핀의 좌측에 또다른 'GND' 심폴을 배치한다. 이제 회로도는 아래 그림처럼 될 것이다.

다음으로는 모든 컴포넌트를 연결한다. 오른쪽 툴바에서 'Place wire' 아이콘(
 )을 클릭한다.
)을 클릭한다.'Place Bus'를 선택하지 않도록 주의하자. 이것은 'Place wire' 바로아래 나타나지만, 더 두꺼운 선이다. 'Place Bus'는 Bus Connections 부분에서 설명한다.
마이크로컨트롤러의 7번핀 끝에 작은 원을 선택하고 LED의 1번 핀의 작은 원을 선택한다. 선(wire)을 그릴때 코너를 만들기 위해 한번 클릭한다.
연결된 컴포넌트 위치를 바꾸려면, [g]키 (to grab)를 사용하는 것이 중요하다. [m]키 (move)는 아니다. grap을 사용하는 것은 연결된 선을 유지시켜준다. 컴포넌트를 움직이는 법이 기억나지 않으면 24번 단계를 다시 보자.

이 절차를 반복하여 다른 모든 컴포넌트를 아래 그림과 같이 연결한다. 선을 연결하는 것을 끝내려면 더블 클릭하면 된다. 'VCC'와 'GND' 심볼을 연결할 때는 와이어가 'VCC' 심볼의 아래와 'GND'의 중상단을 선택해야한다.
이번에는 레이블을 사용하여 연결을 만드는 다른 방법을 알아보자. 오른쪽 툴바에서 'Place net label' 아이콘(
 )을 클릭하여 넷 레이블링 툴(net labelling tool)을 선택한다. [i]키를 사용할 수도 있다.
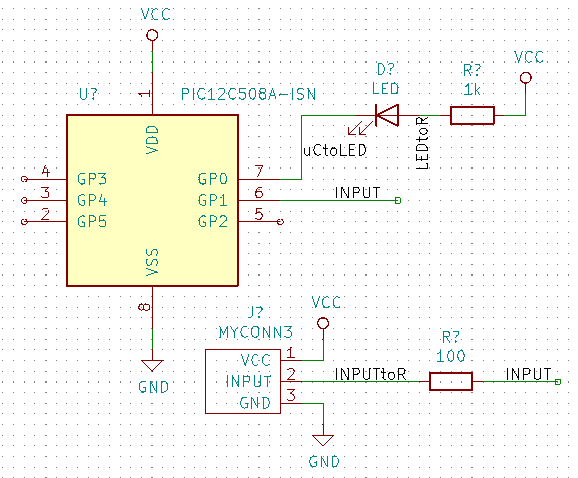
)을 클릭하여 넷 레이블링 툴(net labelling tool)을 선택한다. [i]키를 사용할 수도 있다.마이크로컨트롤러의 6번핀에 연결된 선의 중간을 선택한다. 이 레이블을 'INPUT'으로 한다. 레이블은 여전히 이동, 회전 그리고 삭제할 수 있는 독립적인 아이템이다. 레이블의 작은 앵커 사각형(anchor rectangle)은 효과가 있으려면 정확히 선 또는 핀위에 있어야 한다.
동일한 절차를 따라서 100 ohm 저항의 오른쪽 라인에 또다른 레이블을 배치하고 이름을 'INPUT'으로 한다. 동일한 이름을 가진 두개의 리에블은 PIC의 6번핀과 100 ohm 저항사이에 보이지 않는 연결을 만든다. 이것은 라인을 그리는 것이 전체 회라를 더 엉망으로 만드는 복잡한 설계에서 선을 연결할때 유용한 기술이다. 레이블을 배치하기 위해 선이 반드시 필요한것은 아니다. 간단하게 레이블을 핀에 부착할 수 있다.
레이블은 또한 정보를 표시할 목적으로 간단하게 사용될 수 있다. PIC의 7번핀에 레이블을 배치하고 이름을 'uCtoLED'로 한다. 저항과 LED사이의 선은 'LEDtoR'로 이름짓는다. 'MYCONN3'와 저항사이는 'INPUTtoR'로 이름짓는다.
'VCC'와 'GND' 레이블이 연결된 파워 객체를 내포하고 있기 때문에 'VCC'와 'GND'를 레이블링하지 않는다.
최종 결과는 아래 그림과 같다.
이제 연결되지 않은 선을 다뤄보자. 연결되지 않은 핀 또는 선은 KiCad로 점검시 결고(warning)를 발생시킨다. 이러한 경고를 피하려면 연결되지 않은 선이 의도적인것을 프로그램에 알리거나 수동으로 각각의 연결되지 않은 선 또는 핀을 'unconnected'로 표시핳 수 있다.
오른쪽 툴바에서 'Place no connection flag'아이콘(
 )을 선택하고 2, 3,4,5번 핀을 선택한다. 션이 연결되지 않음이 의도적인것을 표시하기 위해 'X'표시가 나타난다.
)을 선택하고 2, 3,4,5번 핀을 선택한다. 션이 연결되지 않음이 의도적인것을 표시하기 위해 'X'표시가 나타난다.
몇몇 컴포넌트는 보이지 않는 파워핀을 갖는다. 왼쪽 툴바에서 'Show hidden pins'아이콘(
 )을 선택하여 이를 보이게 할 수 있다. 'VCC'와 'GND' 이름이 지켜진다면 숨겨진 파워 핀은 자동으로 연결된다. 보통은 숨겨진 파워 핀을 만들지 않아야 한다.
)을 선택하여 이를 보이게 할 수 있다. 'VCC'와 'GND' 이름이 지켜진다면 숨겨진 파워 핀은 자동으로 연결된다. 보통은 숨겨진 파워 핀을 만들지 않아야 한다.어디선가로부터 파워가 들어오는 것을 KiCad에 나타내기 위해 'Power Flag'를 추가해야 한다. [a]키를 누르고 'power'라이브러이에서 'PWR_FLAG'를 찾는다. 그중 두개를 배치하고 아래 그림과 같이 'GND'와 'VCC'핀에 연결한다.
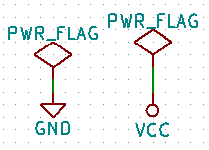
이것은 고전적인 회로 검사 결고를 피할 것이다. : 몇몇 다른 핀에 연결된 Pin이지만 이를 구동할 핀이 없다.(Pin connected to some other pins but no pin to drive it.)
때때로 여기저기에 주석(Comment)를 작성하는 것이 좋다. 회로에 주석을 추가하려면 오른쪽 툴바에서 'Place text'아이콘(
 )을 사용한다.
)을 사용한다.이제 모든 컴포넌트에 유일한 식별자(identifier)가 필요하다. 사실, 여기서 사용한 많은 컴포넌트가 여전히 'R?' 또는 'J?'로 되어 있다. 식별자 할당은 상단 툴바에서 'Annotate schematic symbols' 아이콘(
 )를 선택하여 자동으로 할 수 있다.
)를 선택하여 자동으로 할 수 있다.Annotate Schematic 윈도우에서 'Use the entire schematic'을 선택하고 'Annotate' 버튼을 누른 후 'Close'한다. 모든 '?'가 숫자로 교체되었다. 각 식별자는 이제 유일하다. 이글의 예제에서는 'R1', 'R2', 'U1', 'J1'으로 이름지어졌다.
이제 회로의 오류(error)를 검사한다. 상단 툴바에서 'Perform electrical rules check' 아이콘(
 )을 선택하고 'Run' 버튼을 누른다. '연결되지 않은 선'같은 오류 또는 경고를 알려주는 레포트가 생성된다. 0개의 오류와 0개의 경고여야 한다. 오류 또는 경고가 있는 경우, 작은 초록색 화살표가 회로의 에러 또는 오류 지점에 나타난다. 'Create ERC file report'를 체크하고 에러에 대한 좀더 많은 정보를 받기 위해 'Run' 버튼을 다시 누른다.
)을 선택하고 'Run' 버튼을 누른다. '연결되지 않은 선'같은 오류 또는 경고를 알려주는 레포트가 생성된다. 0개의 오류와 0개의 경고여야 한다. 오류 또는 경고가 있는 경우, 작은 초록색 화살표가 회로의 에러 또는 오류 지점에 나타난다. 'Create ERC file report'를 체크하고 에러에 대한 좀더 많은 정보를 받기 위해 'Run' 버튼을 다시 누른다.만약 'No default editor found, you must choose it' 경고가 있다면, 경로를 윈도우에서는 c:\windows\notepad.exe 또는 리눅스에서는 /usr/bin/gedit로 설정해 보자.
회로 설계가 끝났다. 이제는 각 컴포넌트에 footprint를 추가하는 Netlist 파일을 생성할 수 있다. 상단 메뉴바에서 'Generate netlist' 아이콘(
 )를 선택한다. 'Generate Netlist' 버튼을 누르고 기본 설정된 파일이름으로 저장한다.
)를 선택한다. 'Generate Netlist' 버튼을 누르고 기본 설정된 파일이름으로 저장한다.Netlist는 KiCad의 이전 버전에서는 필수였다. 요즘 버전에서는 이를 무시하고 대신 Tools → Update PCB from Schematic'을 사용할 수 있다. 만약 이렇게 한다면 우선 footprint를 symbol에 먼저 할당해야 한다.
Netlist 파일을 생성한 후 상단 메뉴에서 'Run Cvpcb' 아이콘(
 )을 선택한다. 만약 missing file 에러 윈도우가 팝업되면 무시하고 'OK'를 누른다.
)을 선택한다. 만약 missing file 에러 윈도우가 팝업되면 무시하고 'OK'를 누른다.footprint를 symbol에 추가하는 더 많은 방법이 있다.
- Symbol에서 오른쪽 클릭 &rarr Properties → Edit Footprint
- Symbol에서 더블 클릭 또는 symbol에서 오른쪽 클릭 → Properties → Edit Properties → Footprint
- Tools → Edit Symbol Fields
- Eeshcema의 Preferences에서 Show footprint previews in symbol chooser를 체크하고 배치하기 위해 새로운 심볼을 선택할 때 footprint를 선택한다
Cvpcb는 회로도내 모든 컴포넌트를 KiCad 라이브러리내 footprint로 연결할 수 있게 한다. 중앙 화면은 회로에서 사용한 모든 컴포넌트를 보여준다. 여기서는 'D1'을 선택한다. 오른쪽 화면에 사용가는한 모든 footprint가 나온다. 목록 아래에서 'LED_THT:LED-D5.0mm'를 찾아 더블클릭한다.
오른쪽 화면은 단지 가능한 footprint의 선택된 하위 그룹을 보여준다. 이것은 KiCad가 적당한 footprint의 하위집합을 제안하려하기 때문이다. 이 필터를 활성/비활성하기 위해
 ,
,  ,
,  아이콘을 클릭한다.
아이콘을 클릭한다.'U1'은 'Package_DIP:DIP-8_W7.62mm', 'J1'은 'Connector:Banana_Jack_3Pin', 'R1'과 'R2'는 'Resistor_THT:R_Axial_DIN0207_L6.3mm_D2.5mm_P2.54mm_Vertical' footprint를 선택한다.
선택한 footprint가 어떻게 보이는지 알고 싶다면 현재 footprint의 preview로 'View selected footprint' 아이콘(
 )을 선택할 수 있다.
)을 선택할 수 있다.끝났다. File &rarr Save Schematic 또는 'Apply, Save Schematic & Continue' 버튼을 눌러 회로도를 저장할 수 있다.
Cvpcb를 닫고 Eeschema Schematic 편집기로 되돌아 갈 수 있다. 만약 Cvpcb에서 저장하지 않았다면 File &rarr Save로 저장한다. netlist를 다시 생성한다. netlist 파일은 모든 footprint로 갱신된다. 만약 어떤 디바이스에 대한 footprint가 없다면, footprint를 만들어야 한다. 이 부분은 이후 다른 단락에서 설명한다.
이제 모든 심볼이 footprint를 갖는다. net list와 다음 두단계 대신 Tools → Update PCB from Schematic를 사용할 수 있다. 만약 그렇게 하면, Pcbnew는 Upate PCB from Schematic dialog로 열린다. 그러면 이 글의 Pcbnew 단락에서의 명령을 따라할 수 있다.
KiCad 프로젝트 매니저로 바꾸면 파일 목록에서 net list 파일을 볼 수 있다.
netlist 파일은 모든 컴포넌트와 각 핀 연결을 나타낸다. netlist 파일은 실제로 쉽게 점검, 편집 또는 작성할 수 있는 text 파일이다.
라이브러리 파일(*.lib) 역시 text 파일이며 쉽게 수정 또는 작성가능하다.
BOM(Bill Of Materials)을 생성하려면 Eeschema 회로 편집기으로 가서 상단 메뉴에서 'Generate bill of materials' 아이콘(
 )을 선택한다. 기본적으로 동작하는 플러그인이 없으므로 Add Plugin 버튼을 눌러 하나 추가한다. 사용할 *.xsl 파일을 선택한다. 여기서는 bom2csv.xsl을 선택한다.
)을 선택한다. 기본적으로 동작하는 플러그인이 없으므로 Add Plugin 버튼을 눌러 하나 추가한다. 사용할 *.xsl 파일을 선택한다. 여기서는 bom2csv.xsl을 선택한다.Linux:
만약 xsltproc가 없다면,아래 명령으로 설치할 수 있다.<br> Ubuntu같은 Debian 파생 배포판은 <pre><code>sudo apt-get install xsltproc</code></pre> RedHat 파생 배포판은 <pre><code>sudo yum install xsltproc</code></pre> 만약 위 두가지 종류의 배포판중 하나를 사용한다면, xsltproc 패키지를 설치하기 위한 배포판 패키지 매니져 명령을 사용한다.<br> xsl 파일은 /usr/lib/kicad/plugins/에 위치한다.<br> <br>Apple OS X:
만약 xsltproc가 없다면,이를 포함하는 Apple site로부터 Apple Xcode tool을 설치하거나 아래 명령으로 설치할 수 있다.<br> <pre><code>brew install libxslt</code></pre> xsl 파일은 /Library/Application Support/kicad/plugins/에 위치한다.<br> <br>Windows:
xsltproc.exe와 포함된 xsl 파일은 <KiCad install directory>\bin과 <KiCad install directory>\bin\scripting\plugins에 각각 위치한다.<br>All Platforms:
최종 bom2csv.xsl을 다음 경로에서 얻을 수 있다.[https://gitlab.com/kicad/code/kicad/raw/master/eeschema/plugins/xsl_scripts/bom2csv.xsl](https://gitlab.com/kicad/code/kicad/raw/master/eeschema/plugins/xsl_scripts/bom2csv.xsl)KiCad는 자동으로 명령을 생성한다. 예를 들면,
xsltproc -o "%O" "/home//kicad/eeschema/plugins/bom2csv.xsl" "%I" 확장자를 추가하기 원한다면, 다음과 같이 명령을 바꾼다.
xsltproc -o "%O.csv" "/home//kicad/eeschema/plugins/bom2csv.xsl" "%I" 좀 더 많은 정보는 Help 버튼을 눌러 확인한다.
'Generate'를 누른다. 파일(프로젝트이름과 동일한)이 프로젝트 폴더에 생긴다. *.csv 파일을 열어본다.
이제 PCB 레이아웃 부분을 알아볼 준비가 되었다. 하지만 그 전에 버스 라인(bus line)을 사용하여 컴포넌트를 연결하는 방법을 빠르게 알아보자.